















| Для линии сортировки робота используется визуальное точное позиционирование; робот может быстро и точно захватывать материал с помощью вакуумного патрона или пневматического зажимного приспособления. |
| Технические особенности |
|
|
| Параметры оборудования |
|
|
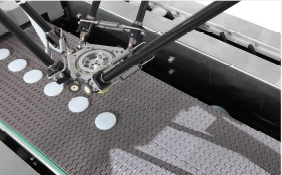
| Для линии сортировки робота используется визуальное точное позиционирование; робот может быстро и точно захватывать материал с помощью вакуумного патрона или пневматического зажимного приспособления. |
| Технические особенности |
|
|
| Параметры оборудования |
|
|