















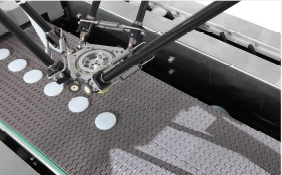
| بصری دقیق موقعیت د روبوټ ترتیب کولو لاین لپاره غوره شوی؛ روبوټ کولی شي د ویکیوم چک یا نیومیټیک کلیمپینګ جبڑے سره ګړندي او دقیق ونیسي. |
| تخنیکي ځانګړتیاوې |
|
|
| د تجهیزاتو پیرامیټونه |
|
|
| بصری دقیق موقعیت د روبوټ ترتیب کولو لاین لپاره غوره شوی؛ روبوټ کولی شي د ویکیوم چک یا نیومیټیک کلیمپینګ جبڑے سره ګړندي او دقیق ونیسي. |
| تخنیکي ځانګړتیاوې |
|
|
| د تجهیزاتو پیرامیټونه |
|
|