















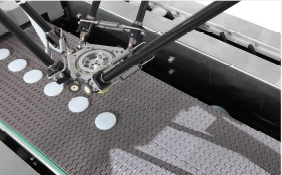
| Penempatan visual yang tepat diadopsi untuk garis penyortiran robot; robot dapat mengambil dengan cepat dan akurat dengan chuck vakum atau rahang penjepit pneumatik. |
| Fitur Teknik |
|
|
| Parameter peralatan |
|
|
| Penempatan visual yang tepat diadopsi untuk garis penyortiran robot; robot dapat mengambil dengan cepat dan akurat dengan chuck vakum atau rahang penjepit pneumatik. |
| Fitur Teknik |
|
|
| Parameter peralatan |
|
|