















| Định vị chính xác bằng hình ảnh được áp dụng cho dây chuyền phân loại robot; robot có thể gắp nhanh và chính xác bằng mâm cặp chân không hoặc hàm kẹp khí nén. |
| Đặc tính kỹ thuật |
|
|
| Thông số thiết bị |
|
|
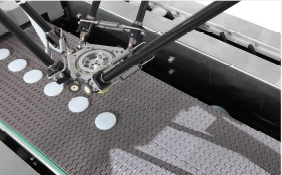
| Định vị chính xác bằng hình ảnh được áp dụng cho dây chuyền phân loại robot; robot có thể gắp nhanh và chính xác bằng mâm cặp chân không hoặc hàm kẹp khí nén. |
| Đặc tính kỹ thuật |
|
|
| Thông số thiết bị |
|
|