















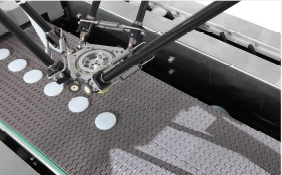
| Un positionnement visuel précis est adopté pour la ligne de tri robotisée ; le robot peut saisir rapidement et avec précision grâce au mandrin à vide ou à la mâchoire de serrage pneumatique. |
| Caractéristiques techniques |
|
|
| Paramètres de l'équipement |
|
|
| Un positionnement visuel précis est adopté pour la ligne de tri robotisée ; le robot peut saisir rapidement et avec précision grâce au mandrin à vide ou à la mâchoire de serrage pneumatique. |
| Caractéristiques techniques |
|
|
| Paramètres de l'équipement |
|
|